How To : Apply Coning Compensation
Demonstrate coning compensation on integrated angular rate measurements [CIBS25].
1import sys, os
2
3sys.path.insert(0, os.path.join("..", "..", ".."))
4
5import numpy as np
6from scipy.interpolate import BPoly
7
8import matplotlib.pyplot as plt
9
10# %matplotlib ipympl
11
12from functools import partial
13
14# Custom package for computing basis functions and derivatives
15from hitman.ode import butcher_tableaux, ButcherTableau
16from hitman.ode import rkmk_fixed_discrete
17from hitman.rotation import LieExponential as SO
18from hitman.plot import plot_hermite_spline
19from hitman.gyro import functional_factory
Measurement and Solution Functions
Consider the relationships
Our goal is to score methods for approximating change in attitude, \(\Delta \widetilde{R} \), from measurements \(\Delta \theta\). As a test case we define an attitude trajectory using a single polynomial function. We may choose to define either \(\omega\) or \(\phi\). The functional_factory() then generates measurement functional \( \Delta \theta \) and truth solution \( \Delta R \) from a single polynomial expression: either \(\omega\) or \(\phi\).
1# Benign trajectory
2A = np.array(
3 [
4 [1, 0, -1],
5 [4 / 3, 0, -4 / 3],
6 [11 / 6, 1 / 3, -11 / 3],
7 [5 / 2, 4 / 3, -4 - np.pi],
8 ]
9)
10is_omega = True
11
12# Generate random control points
13np.random.seed(0)
14A = np.random.randn(6, 3)
15is_omega = False
16
17# Form polynomial and required model functions
18f = BPoly(A[:, np.newaxis, :], [0.0, 1.0])
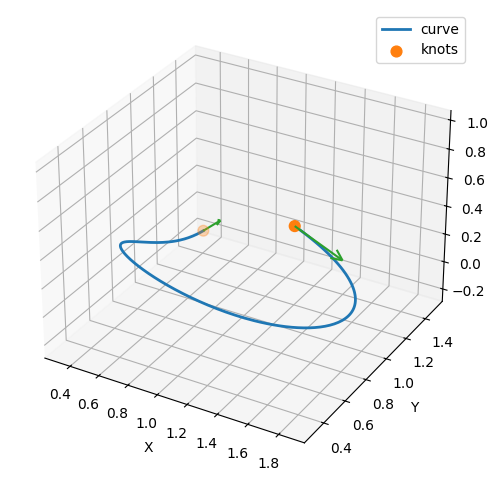
19_, _ = plot_hermite_spline(f, x=[0, 1])
20
21eval_delta_theta, eval_delta_R, eval_omega = functional_factory(f, is_omega)
Propagation Equations
Differential equations are typically expressed in terms of instantaneous rates. However, many gyroscopes provide integrate rate measurements. Since we have both instantaneous rates, eval_omega, and integrated rates, eval_delta_theta, we can contrast performance of state propagation algorithms from either measurement category.
Instantaneous Rate Propagation
Instantaneous rates can be propagated using the RKMK method [IMKNorsettZ00]. Different solver orders are utilized depending on which Butcher tableau specified. Note, the tableau determines the number of measurements required as well.
1def rkmk(homega: np.ndarray, tableau: ButcherTableau) -> np.ndarray:
2 """Solve attitude update from instantaneous rates
3
4 Args:
5 homega: instantaneous rates, scaled by step size
6 tableau: ButcherTableau specifying the RK method
7
8 Returns:
9 Rotation matrix
10 """
11
12 # input checking
13 assert isinstance(tableau, ButcherTableau), "Input must be tableau"
14 N = np.unique(tableau.c).size
15 # size of homega must match tableau
16 assert (
17 homega.shape[0] == N
18 ), "For provided tableau, expecting %d samples of omega, received %d" % (
19 N,
20 homega.shape[0],
21 )
22
23 # apply rkmk algorithm and map to SO(3)
24 delta_phi = rkmk_fixed_discrete(homega, np.zeros_like(homega[0]), tableau)
25 return SO.exp(delta_phi)
Integrated Rate Propagation
Propagating integrated rate measurements requires models and approximations. One approach is to model the instantaneous rates as a curve fit to the integrated measurements. Generating samples of instantaneous rate enables use of generalized RK-style solvers.
1def resample_delta_theta(
2 delta_theta: np.ndarray, tau: float, sample_points=np.array([0, 0.5, 1])
3):
4 """Resample delta-theta measurements as polynomial fit of instantaneous rate"""
5 if delta_theta.shape[0] == 1:
6 homega_approx = delta_theta
7 elif delta_theta.shape[0] == 2:
8 A = np.array([[-0.5 * (tau**2), tau], [0.5 * (tau**2), tau]])
9 elif delta_theta.shape[0] == 3:
10 A = np.array(
11 [
12 [(tau**3) / 3, -0.5 * (tau**2), tau],
13 [(tau**3) / 3, 0.5 * (tau**2), tau],
14 [7 * (tau**3) / 3, 1.5 * (tau**2), tau],
15 ]
16 )
17 else:
18 raise NotImplementedError(
19 "Requires one, two, or three delta-theta measurements"
20 )
21
22 if delta_theta.shape[0] > 1:
23 p = np.linalg.solve(A, delta_theta)
24 t_local = tau * sample_points
25 homega_approx = tau * np.vander(t_local, p.shape[0]) @ p
26
27 return homega_approx
Generalized solvers are computationally expensive. Instead of resampling instantaneous rates and applying generalized solvers, it is possible to approximate the solver solutions from integrated rate measurements directly [CIBS25]. Here we demonstrate approximations for 2 and 3 integrated rate measurements.
1def SingleSpeed2(delta_theta):
2 """Approximate delta-R from two delta-theta measurements"""
3 assert delta_theta.shape[0] == 2, "Requires two delta-theta measurements"
4 delta_phi = np.zeros_like(delta_theta[0])
5 k = 1
6 delta_phi += delta_theta[k] + np.cross(delta_theta[k - 1], delta_theta[k]) / 12
7 return SO.exp(delta_phi)
8
9
10def SingleSpeed3(delta_theta):
11 """Approximate delta-R from three delta-theta measurements"""
12 assert delta_theta.shape[0] == 3, "Requires three delta-theta measurements"
13 delta_phi = np.zeros_like(delta_theta[0])
14 k = 1
15 delta_phi += (
16 delta_theta[k]
17 + (
18 np.cross(delta_theta[k + 1], delta_theta[k - 1])
19 + 13 * np.cross(delta_theta[k - 1] - delta_theta[k + 1], delta_theta[k])
20 )
21 / 12
22 / 24
23 )
24 return SO.exp(delta_phi)
Benchmark Algorithms
Define a dictionary of algorithms to contrast. For each algorithm, we indicate
func: solver functional to operate on the sampled ratesn_samples: number of samples required by the solverrate: whether the rate samples areinstantaneous, \(\omega\);integrated,\(\Delta \theta\); orresampledinstantaneous rates derived by curve fitting to integrated rates.
1algorithm_dict = {
2 "FwdElr_omega": {
3 "func": partial(rkmk, tableau=butcher_tableaux["FwdElr"]),
4 "n_samples": 1,
5 "rate": "instantaneous",
6 },
7 "ExMid_omega": {
8 "func": partial(rkmk, tableau=butcher_tableaux["ExpMid"]),
9 "n_samples": 2,
10 "rate": "instantaneous",
11 },
12 "RK3_omega": {
13 "func": partial(rkmk, tableau=butcher_tableaux["RK3"]),
14 "n_samples": 3,
15 "rate": "instantaneous",
16 },
17 "RK4_omega": {
18 "func": partial(rkmk, tableau=butcher_tableaux["RK4"]),
19 "n_samples": 3,
20 "rate": "instantaneous",
21 },
22 "FwdElr_delta": {
23 "func": partial(rkmk, tableau=butcher_tableaux["FwdElr"]),
24 "n_samples": 1,
25 "rate": "resampled",
26 },
27 "ExMid_delta": {
28 "func": partial(rkmk, tableau=butcher_tableaux["ExpMid"]),
29 "n_samples": 2,
30 "rate": "resampled",
31 },
32 "RK3_delta": {
33 "func": partial(rkmk, tableau=butcher_tableaux["RK3"]),
34 "n_samples": 3,
35 "rate": "resampled",
36 },
37 "RK4_delta": {
38 "func": partial(rkmk, tableau=butcher_tableaux["RK4"]),
39 "n_samples": 3,
40 "rate": "resampled",
41 },
42 "SingleSpeed2": {
43 "func": SingleSpeed2,
44 "n_samples": 2,
45 "rate": "integrated",
46 },
47 "SingleSpeed3": {
48 "func": SingleSpeed3,
49 "n_samples": 3,
50 "rate": "integrated",
51 },
52}
Sample Trajectory
Define trajectory as a polynomial curve in \(\mathbb{R}\rightarrow \mathbb{R}^3\). The curve may represent \(\omega\) or \(\phi\).
Score algorithms and save results in :class:pandas.DataFrame.
1import pandas as pd
2import itertools
3
4# Increasing step sizes
5tau_all = np.logspace(-6, -1, num=20)
6
7# Random sample points for trajectory
8t_all = np.random.uniform(0.1, 0.9, 20)
9
10# Generate all combinations of tau and t
11combinations = list(itertools.product(tau_all, t_all))
12
13# Create a DataFrame from the combinations
14df = pd.DataFrame(combinations, columns=["tau", "t"])
15
16# Iterate over each row in the DataFrame
17for index, row in df.iterrows():
18 tau = row["tau"]
19 t = row["t"]
20
21 # Generate instantaneous rate measurements
22 omega = np.array([eval_omega(t) for t in t + tau * np.arange(-1, 0.5, 0.5)])
23
24 # Generate sequential integrated rate measurements
25 delta_theta = np.vstack([eval_delta_theta(t + k * tau, tau) for k in range(-1, 2)])
26
27 # Define the truth eval_delta_R
28 Rstar = eval_delta_R(t, tau)
29 assert eval_omega([1, 1.5]).shape == (2, 3), "Wrong omega dims!"
30
31 # Benchmark each algorithm in the dictionary
32 for key, algorithm_data in algorithm_dict.items():
33 func = algorithm_data["func"]
34 n_samples = algorithm_data["n_samples"]
35 rate = algorithm_data["rate"]
36
37 if rate == "instantaneous":
38 # instantaneous rate measurements
39 # * Note * RKMK requires measurements scaled by timestep!
40 dat = tau * np.atleast_2d(omega[0:n_samples, :])
41 elif rate == "integrated" or rate == "resampled":
42 dat = np.atleast_2d(delta_theta[0:n_samples, :])
43 if rate == "resampled":
44 # approximate h-omega by resampling
45 dat = resample_delta_theta(dat, tau)[0:n_samples, :]
46 else:
47 raise ValueError(f"Invalid rate: {rate}")
48
49 # propagate
50 Rhat = func(dat)
51 # score
52 err = np.linalg.norm(Rhat - Rstar)
53 # retain result
54 df.at[index, key] = err
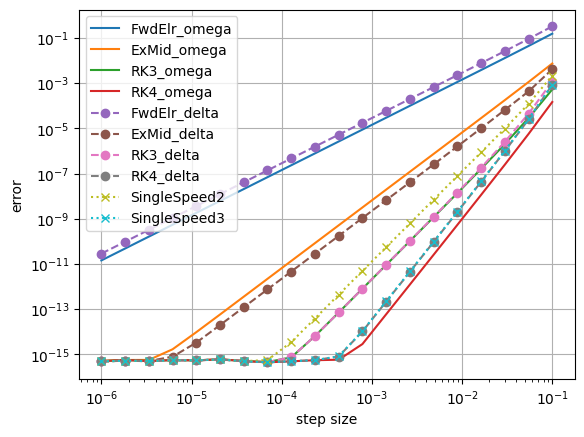
Plot Results
1df_mean = df.groupby("tau").mean().reset_index()
2
3# get column names of df_mean (excluding 'tau')
4column_names = df_mean.columns[2:].tolist()
5
6# plot loglog of df_mean using columns 1:-
7for i, column in enumerate(column_names):
8 if i < len(column_names) - 6: # solid lines for first column
9 linestyle = "-"
10 marker = None
11 elif i < len(column_names) - 2: # solid lines for first column
12 linestyle = "--"
13 marker = "o"
14 else:
15 linestyle = ":"
16 marker = "x"
17
18 plt.loglog(
19 df_mean.iloc[:, 0],
20 df_mean[column],
21 linestyle=linestyle,
22 label=column,
23 marker=marker,
24 )
25# plt.ylim([1e-16, 1])
26plt.legend()
27plt.grid(True)
28plt.xlabel("step size")
29plt.ylabel("error")
30plt.show()